The Quanser QDrone autonomous air vehicle is a midsized quadrotor equipped with a powerful on-board Intel® Aero Compute Board, multiple high resolution cameras and built-in WiFi. This open-architecture research-grade drone is tuned to accelerate your research and is ideal for innovative research in multi-agent, swarm and vision-based applications
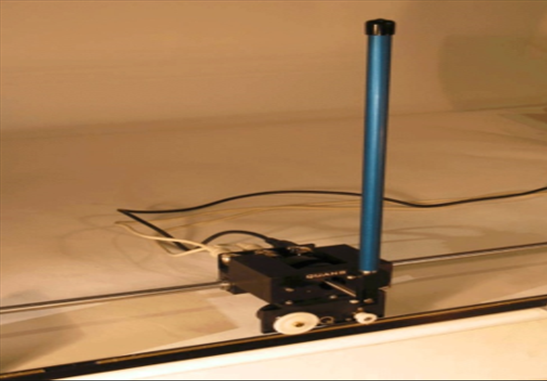
Inverted Pendulum
The objective is to design a controller for the physical control system that keeps the inverted pendulum balanced using the command given to the linear cart.
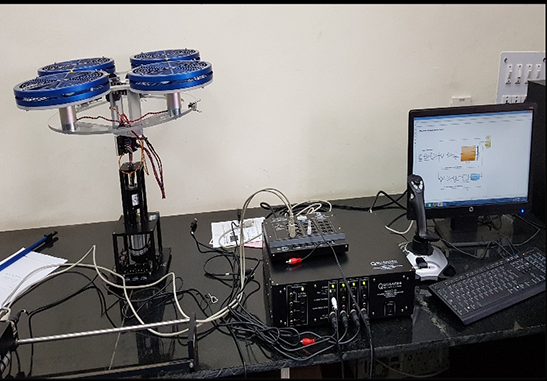
3 DOF Hover System
The objective is to design a controller for controlling the pitch, Roll, and yaw motions of the 3 DOF Hover System.